Les projets de robotique STEM offrent un moyen pour les équipes d'étudiants d'apprendre les nombreux aspects du développement de produits sans fil, de la programmation au prototypage en passant par les principes fondamentaux de la connectivité RF et cellulaire qui prennent en charge les communications sans fil dans l'Internet des objets. Dans ce billet de blog, nous fournissons un aperçu du Earth Rover de Digi, une initiative de conception et de construction développée par l'équipe d'ingénierie de Digi comme un exemple de projet idéal pour les projets de robotique des étudiants.
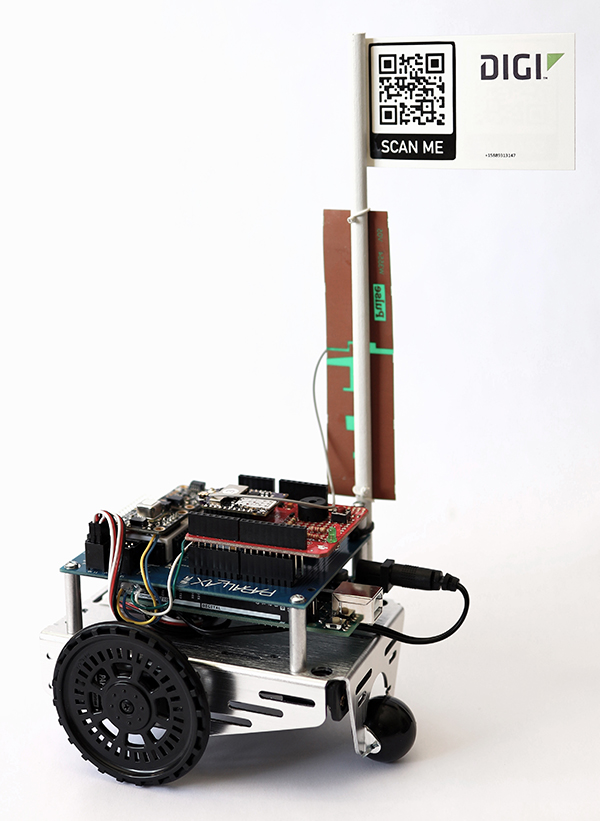
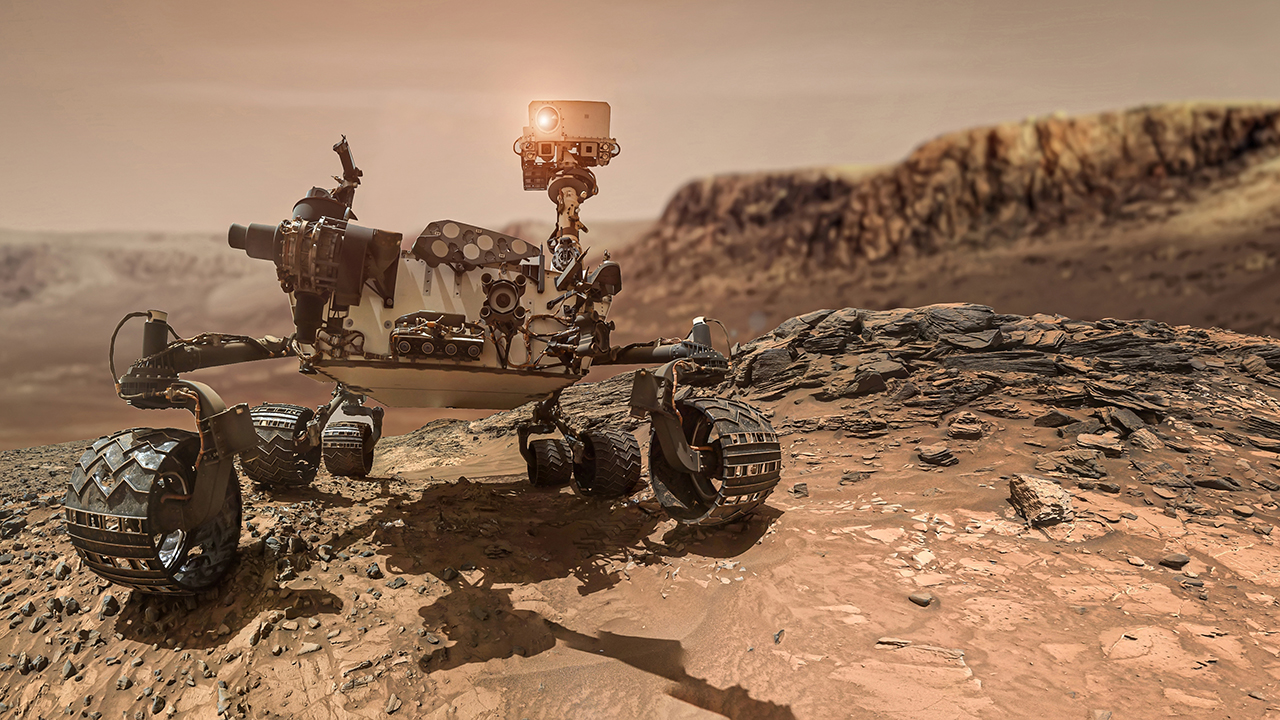
Le Earth Rover est un robot éducatif STEM qui démontre la puissance du cellulaire IoT pour les dispositifs à distance. Il est contrôlé à distance comme un Mars Rover mais fonctionne ici sur Terre. Le Earth Rover communique à l'aide de messages texte SMS qui permettent à tout le monde d'interagir avec lui. Aucune application ou connexion n'est nécessaire.
Earth Rover présente le Digi XBee 3 Cellulaire LTE-M/NB-IoT Le Rover accepte les commandes par message texte de plusieurs utilisateurs simultanés qui peuvent lui demander de conduire dans différentes directions, de transmettre des données de capteurs environnementaux, de jouer des sons et d'envoyer une carte avec sa position. Le Rover accepte les commandes par SMS de plusieurs utilisateurs simultanés, qui peuvent lui demander de conduire dans différentes directions, de transmettre des données de capteurs environnementaux, d'émettre des sons et d'envoyer une carte indiquant sa position. Le module cellulaire Digi XBee 3 peut se connecter aux robots partout dans le monde grâce aux réseaux cellulaires 4G LTE-M.
 Les Earth Rovers - il existe actuellement quatre appareils identiques - ont fait leurs débuts au Consumer Electronics Show (CES) de Las Vegas en janvier 2022.
Les Earth Rovers - il existe actuellement quatre appareils identiques - ont fait leurs débuts au Consumer Electronics Show (CES) de Las Vegas en janvier 2022.
Leur objectif est de démontrer la valeur essentielle du module Digi XBee 3 Global IoT , notamment la gestion complète des actifs à distance, les opérations complexes dans un budget de puissance et de bande passante restreint, le fonctionnement dans des endroits difficiles d'accès et la valeur de la connaissance de la localisation intégrée (GNSS).
La démonstration de Earth Rover que nous présentons au salon permet aux participants de contrôler le robot à l'aide de leur smartphone. De simples commandes textuelles font bouger le robot, et les capteurs du robot fournissent des données pour la surveillance à distance. Le module Digi XBee fournit des informations de localisation grâce aux satellites GPS, et les capteurs renvoient la température et d'autres conditions environnementales, le tout en temps réel.
Comment Earth Rover peut inspirer les équipes de robotique STEM
Le Earth Rover est un excellent exemple de projet robotique STIM, car il permet aux étudiants de l'université et du secondaire de s'initier à l'exploration à distance et de renforcer leurs compétences en matière de téléphonie cellulaire ( IoT), afin d'être prêts à concevoir les prochaines générations d'appareils connectés.
À titre d'exemple, des équipes d'étudiants en robotique pourraient être chargées de construire un robot similaire et de participer à une compétition dont l'objectif est de permettre à chaque robot terrien de survivre de manière autonome le plus longtemps et/ou de parcourir la plus grande distance sans aucune interaction manuelle.

Une fois qu'un Earth Rover s'est "posé" à un endroit, il fonctionnera de manière autonome avec seulement des communications à distance limitées. Les étudiants peuvent tirer des enseignements pratiques de leurs propres réussites et échecs, tout en acquérant les compétences nécessaires pour créer la prochaine génération de solutions de dispositifs connectés.
Les rovers interplanétaires sont un modèle formidable pour les appareils cellulaires situés à distance IoT . Tous deux doivent faire beaucoup avec une puissance limitée et doivent faire face à une largeur de bande de communication restreinte et à des connexions potentiellement intermittentes. Ils doivent tous deux effectuer des relevés à distance dans des environnements assez difficiles et être entièrement contrôlés par des commandes radio.
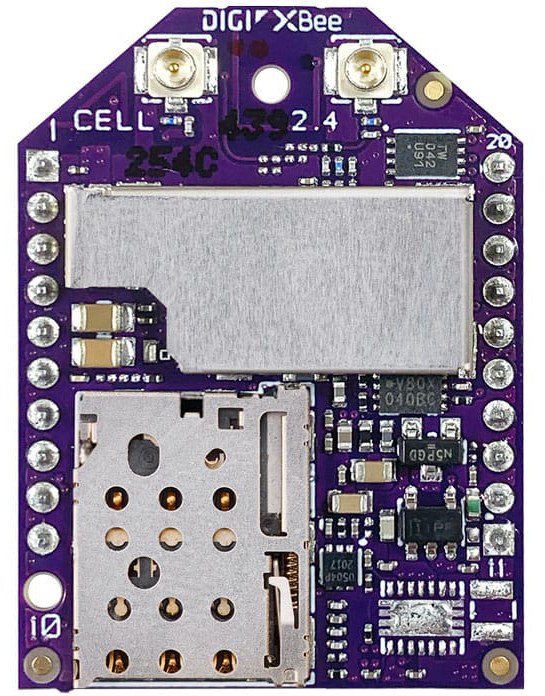 Digi XBee Le module cellulaire est au cœur de ce système. Il parle TCP/IP, UDP, SMS et Bluetooth BLE. Il offre des services de localisation GNSS/GPS et est programmable en MicroPython.
Digi XBee Le module cellulaire est au cœur de ce système. Il parle TCP/IP, UDP, SMS et Bluetooth BLE. Il offre des services de localisation GNSS/GPS et est programmable en MicroPython.
Il existe également un système complet de gestion et de surveillance à distance, Digi Remote Manager® pour la configuration, le contrôle de l'état des appareils et les mises à jour logicielles et micrologicielles en temps réel. Il s'agit d'une plateforme en nuage essentielle pour toute organisation qui construit et déploie des produits robotiques sans fil ou autres produits connectés à grande échelle.
Relier la robotique STEM à l'exploration spatiale
Une fois qu'une machine sans fil est envoyée sur Mars, la laisse électronique est tout ce dont nous disposons. Si un rover martien se bloque, souffre d'un problème logiciel, perd un capteur ou a besoin de nouvelles instructions, la réponse est toujours une commande radio. Personne ne viendra avec une clé à molette ou un bidon d'huile. Aucun composant ne sera jamais remplacé et rien ne sera jamais nettoyé.
C'est fondamentalement la même chose pour les appareils cellulaires IoT . Beaucoup sont installés dans des endroits très inaccessibles, comme à l'intérieur d'une maison privée où le fournisseur n'a pas accès. Dans d'autres cas, l'accès est techniquement possible mais économiquement peu pratique, en raison de la taille ou de la répartition du réseau d'appareils. Le coût de la visite de 100 000 sites et de l'appui sur 100 000 boutons de réinitialisation, sans parler du temps nécessaire, signifie que ces dispositifs... pourrait aussi bien être sur Mars. Donc, tout comme sur la planète rouge, les communications radio sont notre seule connexion. La laisse électronique de IoT est tout ce que nous avons.
Exploitation du rover terrestre

Voici une présentation rapide de la démo du Digi Earth Rover. Pour commencer, les utilisateurs scannent un code QR sur le drapeau du Rover, créant ainsi un message texte adressé au numéro de téléphone du module cellulaire Digi XBee . L'envoi de cette première commande fait avancer le robot pendant quelques secondes. Le robot répond ensuite avec une confirmation et un message d'aide indiquant d'autres commandes opérationnelles utiles.
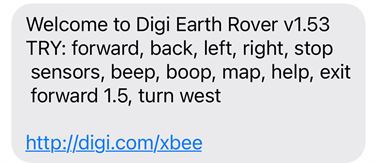 L'envoi de "gauche" ou "droite" déclenche des virages à 90 degrés. L'envoi de "retour" le fait reculer, tout en émettant un bip comme un camion. En fait, vous pouvez aussi lui envoyer "beep"... ou "boop", ce qui fait jouer au robot différentes mélodies. L'ajout d'un chiffre après la commande personnalise le temps d'exécution. Ainsi, "back 10" mettra le Rover en marche arrière pendant dix secondes.
L'envoi de "gauche" ou "droite" déclenche des virages à 90 degrés. L'envoi de "retour" le fait reculer, tout en émettant un bip comme un camion. En fait, vous pouvez aussi lui envoyer "beep"... ou "boop", ce qui fait jouer au robot différentes mélodies. L'ajout d'un chiffre après la commande personnalise le temps d'exécution. Ainsi, "back 10" mettra le Rover en marche arrière pendant dix secondes.
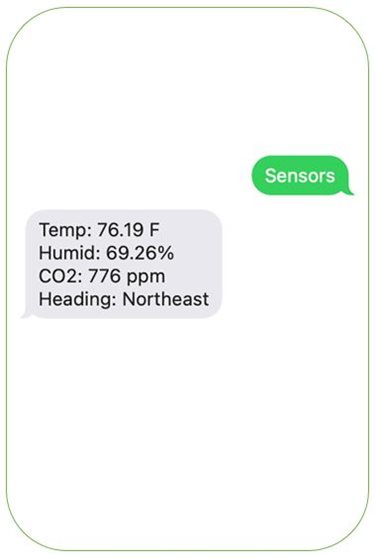 Le Earth Rover dispose de plusieurs capteurs environnementaux qui signalent sa température, son humidité, sa concentration en dioxyde de carbone et son orientation actuelle. La commande "sensors" renvoie un rapport qui ressemble à ceci :
Le Earth Rover dispose de plusieurs capteurs environnementaux qui signalent sa température, son humidité, sa concentration en dioxyde de carbone et son orientation actuelle. La commande "sensors" renvoie un rapport qui ressemble à ceci :
La boussole peut être utilisée pour se tourner vers une direction spécifique. La commande "tourner vers l'est" fera pivoter le robot jusqu'à ce qu'il soit orienté dans cette direction cardinale, facilitant ainsi le processus de navigation absolue.
The Earth Rover uses Digi XBee 3 Cellular's onboard GNSS/GPS to provide its location. The command "map" sent to the Rover returns a special link that displays an interactive map, showing remote users exactly where it is in the world.
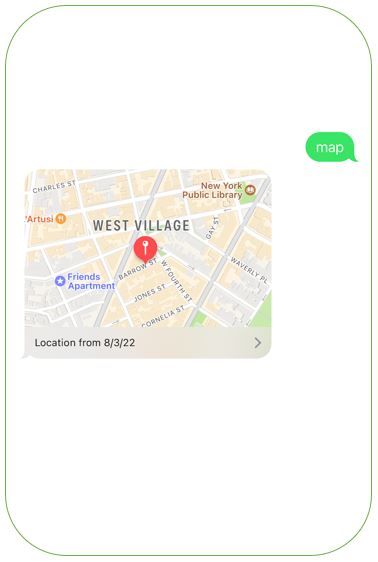 Les services de localisation sont un élément particulièrement important dans le domaine de la téléphonie cellulaire IoT, car, par définition, de nombreux appareils qui l'utilisent sont mobiles et doivent afficher leur position actuelle en temps réel.
Les services de localisation sont un élément particulièrement important dans le domaine de la téléphonie cellulaire IoT, car, par définition, de nombreux appareils qui l'utilisent sont mobiles et doivent afficher leur position actuelle en temps réel.
Les tondeuses à gazon autopilotées peuvent garder la trace des endroits où elles ont travaillé, et les remorques d'expédition peuvent être localisées, qu'elles soient sur la route ou qu'elles attendent d'être récupérées dans un parc d'expédition.
Même les réseaux de dispositifs stationnaires peuvent bénéficier de l'enregistrement précis de l'emplacement des nœuds physiques, automatiquement lors de l'installation, et de l'envoi d'alertes supplémentaires si jamais ils sont déplacés.
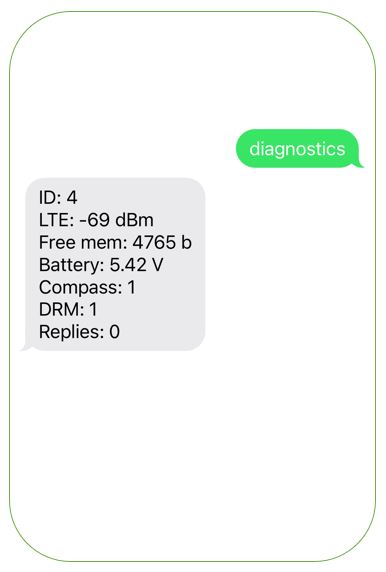 Les Earth Rovers de Digi peuvent être configurés à distance. Il existe une commande spéciale pour récupérer ses diagnostics, y compris l'ID unique, la force du signal, la mémoire libre, la tension et d'autres paramètres d'état.
Les Earth Rovers de Digi peuvent être configurés à distance. Il existe une commande spéciale pour récupérer ses diagnostics, y compris l'ID unique, la force du signal, la mémoire libre, la tension et d'autres paramètres d'état.
D'autres commandes administratives peuvent mettre à jour ces états, ajuster d'autres paramètres et redémarrer ou arrêter le robot. Tout se fait par voie aérienne, comme cela devrait être le cas sur Mars.
Pour les étudiants qui apprennent la conception sans fil, le processus de construction de robots qui peuvent être configurés et contrôlés à distance depuis n'importe quel endroit de la planète - même si le robot se trouve quelque part en dehors de la stratosphère - offre un excellent apprentissage qui peut permettre de développer de grandes compétences pour l'avenir.
De nombreuses équipes d'étudiants ont utilisé les modules de communication cellulaire et RF de Digi, ainsi que les modules de systèmes embarqués de Digi, pour prototyper et construire des projets de toutes tailles ! Vous pouvez voir certaines de nos études de cas d'étudiants dans le contenu connexe ci-dessous.
Recherche de composants pour les robots STEM
Bien que le Digi Digi XBee 3 Cellular IoT soit un produit Digi, "il faut un village", comme on dit. Dans le cas du Earth Rover, les partenaires de Digi ont contribué à sa réalisation :
Si vous souhaitez en savoir plus sur l'écosystème Digi XBee , visitez le site digi.com/xbee, ou contactez Digi pour organiser une visite au siège de Minneapolis, où vous pourrez rencontrer les robots en personne.
Prochaines étapes